本實(shí)驗(yàn)提出了一種基于水下三維相機(jī)陣列的方法��,實(shí)現(xiàn)了深水環(huán)境下短工作距離�、大視場(chǎng)����、高精度的三維重建。該相機(jī)陣列由多個(gè)雙目相機(jī)子系統(tǒng)組成��,為保證測(cè)量結(jié)果的連續(xù)性��,提出了一種統(tǒng)一子系統(tǒng)外部參數(shù)的方法����。采用折射相機(jī)模型和標(biāo)定方法消除了重建過程中的折射誤差。在水下環(huán)境下�����,近紅外隨機(jī)散斑有利于圖像的密集匹配與數(shù)字圖像的相關(guān)�。實(shí)驗(yàn)驗(yàn)證了該方法的準(zhǔn)確性����。平均重建誤差小于1.1 mm�。兩個(gè)子系統(tǒng)在深度方向上的最大相對(duì)誤差為2.61 mm,整體測(cè)量視場(chǎng)為700 mm × 700 mm���。將三維相機(jī)陣列安裝在水下機(jī)器人上,成功應(yīng)用于水下結(jié)構(gòu)缺陷檢測(cè)�����。

基于全局坐標(biāo)系的水下三維陣列相機(jī):(a)編碼點(diǎn)標(biāo)定板. (b)編碼標(biāo)定板特征點(diǎn)三維坐標(biāo). (c)陣列相機(jī)設(shè)計(jì)圖. (d)水下陣列相機(jī)全局外參標(biāo)定原理圖
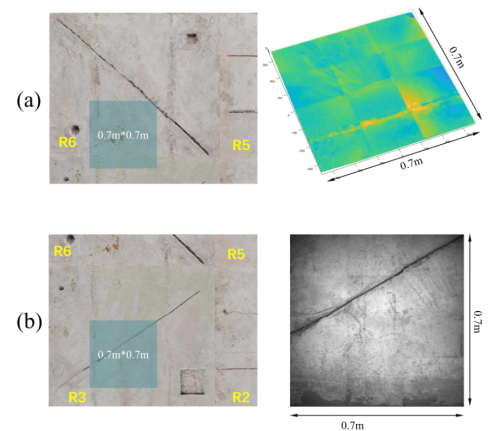
(a)水下陣列相機(jī)三維形貌測(cè)量結(jié)果. (b)水下陣列相機(jī)二維圖像測(cè)量結(jié)果
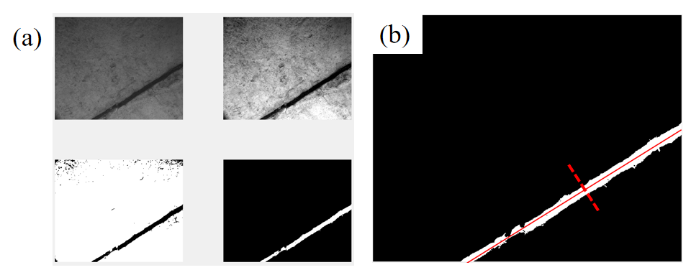
裂縫識(shí)別和寬度計(jì)算:(a)裂縫圖像處理和識(shí)別. (b)裂縫寬度原理
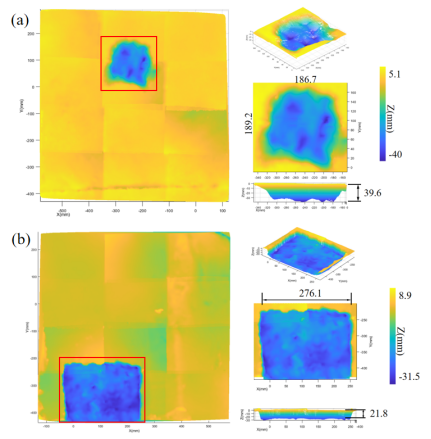
壩面缺陷識(shí)別與三維重建

換算比例 0.215mm/pixel
寬度平均像素 95.50pixel
平均寬度 20.53mm 真實(shí)值20mm
長(zhǎng)度 294.55mm 真實(shí)值300mm