一、系統(tǒng)設(shè)計與精度評估
1����、 系統(tǒng)設(shè)計
本研究中使用的三維數(shù)字圖像相關(guān)(3D-DIC)系統(tǒng)由兩臺工業(yè)相機(jī)(IDS UI-3370CP,2048×2048像素CMOS傳感器)和一臺投影儀(DLP Light Crafter 4500評估模塊)組成�����,如圖1a所示��。投影儀投射數(shù)字相關(guān)計算所需的散斑圖像�,兩臺工業(yè)相機(jī)構(gòu)成一個立體視覺系統(tǒng)�����,用于3D-DIC重建����。編碼點通過15位同心圓進(jìn)行編碼���。一臺單反相機(jī)(NIKON D7100,6000×4000像素CMOS傳感器)用于近距離攝影測量����,以重建編碼點的三維空間坐標(biāo)。工業(yè)相機(jī)配備有C口50mm定焦鏡頭(KowA-LM50XC�����,50mm�,4/3英寸)��,單反相機(jī)則使用尼康50mm定焦鏡頭(50mm F/1.4g)����。3D-DIC系統(tǒng)的物距約為1米,視場約為160×160毫米�����,立體視角為35度。在本研究中,使用團(tuán)隊開發(fā)的內(nèi)部軟件(如圖1b所示)進(jìn)行3D-DIC計算和編碼點重建��。
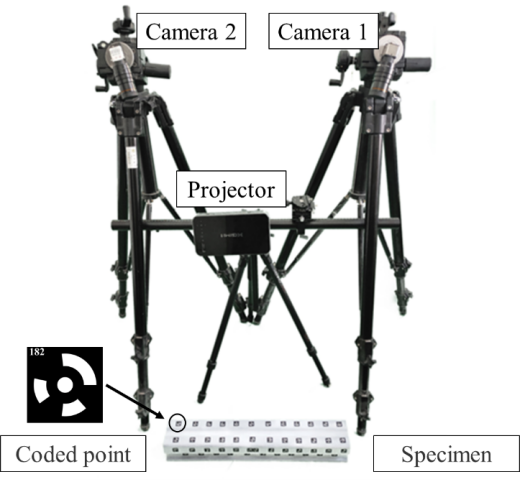
(a)帶有投影儀系統(tǒng)的三維數(shù)字圖像相關(guān)
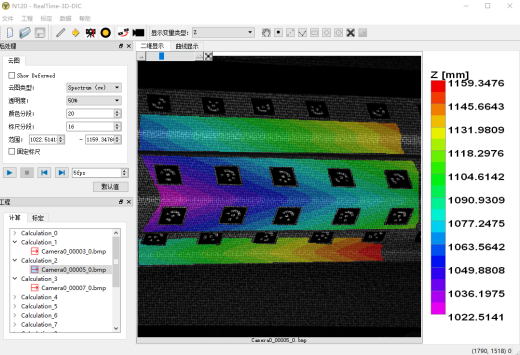 | 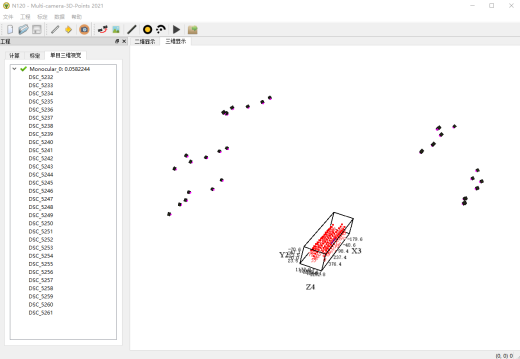 |
| 3D-DIC 軟件 | 3D點云重建軟件 |
(b)測量軟件
圖1 帶有投影儀系統(tǒng)的三維數(shù)字圖像相關(guān)
2��、圓柱管的精度評估
3D-DIC(三維數(shù)字圖像相關(guān))測量的精度不僅高度依賴于設(shè)備的精度�����,還依賴于重建算法的準(zhǔn)確性����。在本節(jié)中�����,首先通過一個簡單的圓柱構(gòu)件驗證該方法在幾何缺陷測量中的精度��,然后再將其應(yīng)用于更復(fù)雜的構(gòu)件����。首先,3D-DIC系統(tǒng)本身的精度可以達(dá)到±0.0016 mm��。其次�����,點云拼接的精度還會受到編碼點識別精度的影響���。這些因素共同決定了測量的精度�����,例如本研究中幾何缺陷的測量精度��。
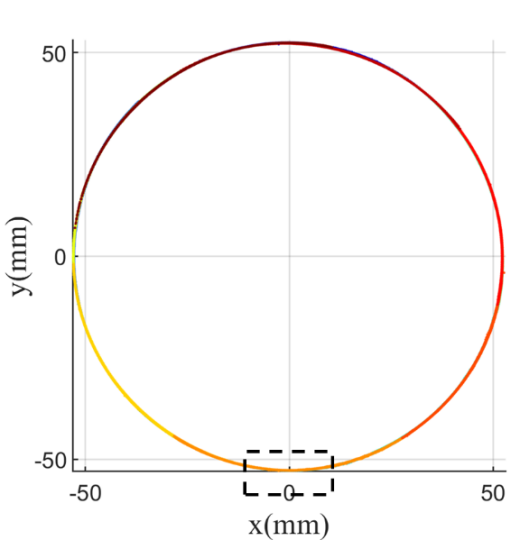
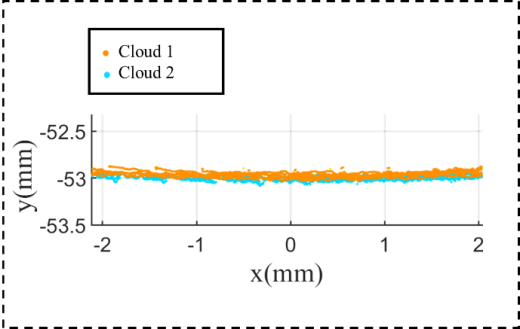
使用一個直徑為106 mm�、長度為280 mm的圓柱管進(jìn)行了驗證測量�。編碼點布置在管的外表面��,如圖2(a)所示����。帶有編碼點的試件通過單反相機(jī)從多個角度進(jìn)行拍攝,然后使用近距離攝影測量技術(shù)重建編碼點的空間坐標(biāo)并建立全局坐標(biāo)系����,如圖2(b)所示。隨后��,通過移動試件獲取幾何形態(tài)點云���,每個局部點云覆蓋試件約20%的周長?����;诹Ⅲw視覺原理計算局部坐標(biāo)系中編碼點的坐標(biāo)數(shù)據(jù)���,并將試件的全場點云拼接完成���。將每個點云點的半徑轉(zhuǎn)換為圓柱坐標(biāo)。全場點云的半徑R如圖2(c)所示�����,其中空白區(qū)域?qū)?yīng)編碼點���?��?傮w而言����,與理想幾何形狀相比����,計算半徑R的標(biāo)準(zhǔn)偏差為0.0739���。在圖3所示的拼接區(qū)域(矩形區(qū)域x)���,點云1和點云2(即旋轉(zhuǎn)試件前后的兩組測量數(shù)據(jù))非常接近。因此��,本研究中使用的方法的全局精度約為±0.1 mm(厚度的5%)�����,滿足精度要求�。
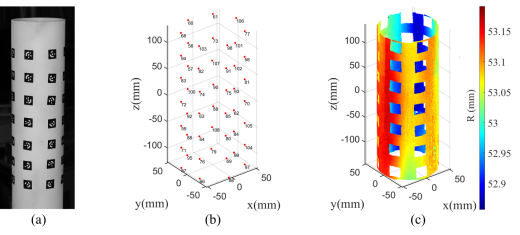
圖2 精度分析測試與可視化:a) 帶有編碼點的圓柱管 b) 編碼點的全局坐標(biāo) c) 測量的半徑R結(jié)果
 |  |
(a) 矩形區(qū)域內(nèi)顯示拼接區(qū)域的橫截面 | (b) 測量的點云半徑R |
圖3 點云拼接(俯視圖):a) 矩形區(qū)域內(nèi)顯示拼接區(qū)域的橫截面 b) 拼接區(qū)域內(nèi)測量的點云半徑R
二�����、貨架立柱的幾何形態(tài)測量
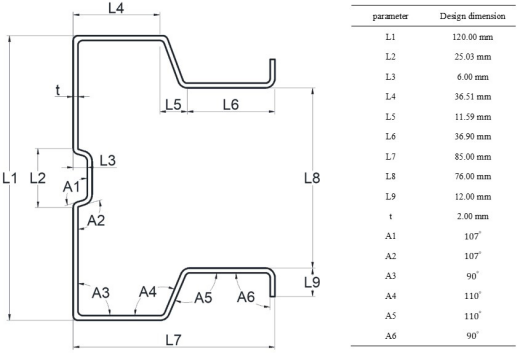
1�、如前所述,所開發(fā)的3D-DIC系統(tǒng)在幾何缺陷測量中的精度在可接受范圍內(nèi)�����。因此���,該系統(tǒng)被應(yīng)用于測量更復(fù)雜截面的缺陷:一種鋼制倉儲貨架立柱。如圖4所示�����,該截面包含多個彎折和加強筋���。截面尺寸為Ω120×85×2.0 mm����,由Q235B(即屈服應(yīng)力fy = 235 MPa)鋼板通過折彎成型���。試件長度為600 mm,無穿孔���。需要注意的是����,由于切割工藝,試件兩端存在明顯的局部幾何缺陷�����。
(a)鋼制貨架立柱的設(shè)計截面(單位:mm)

(b)測試試件
圖4 鋼制貨架立柱:(a) 鋼制貨架立柱的設(shè)計截面(單位:mm) (b) 測試試件
由于截面具有多個彎折�����,其表面無法通過單次相機(jī)拍攝完成測量��,原因是視線遮擋以及相機(jī)視野范圍的限制�����。因此���,為了完整測量試件的幾何形態(tài),采用了多次拍攝的方式��。如圖5所示�����,通過固定3D-DIC系統(tǒng)和投影儀,旋轉(zhuǎn)試件4次以獲得環(huán)形區(qū)域的幾何形態(tài)�����。隨后���,將試件沿縱向平移至新的測試區(qū)域,繼續(xù)進(jìn)行下一個環(huán)形區(qū)域的測量���。特別地,為了確保沒有未測試的區(qū)域�,每個新的測試區(qū)域需要與上一個區(qū)域有少量重疊。由于試件長度為600 mm����,而相機(jī)視野范圍為160×160 mm,因此需要進(jìn)行4次平移�,共拍攝16組圖像。通過3D-DIC計算�,獲得了16組局部坐標(biāo)系下的試件幾何形態(tài)��,如圖5(b)所示����。此外��,如圖5(c)所示�����,通過近距離攝影測量技術(shù)重建的全局坐標(biāo)系與局部坐標(biāo)系中的編碼點結(jié)合���,計算得到剛體變換矩陣Hi。利用這些剛體變換矩陣��,將點云數(shù)據(jù)統(tǒng)一到全局坐標(biāo)系中�,最終實現(xiàn)試件的全場幾何形態(tài)重建,如圖6所示�。
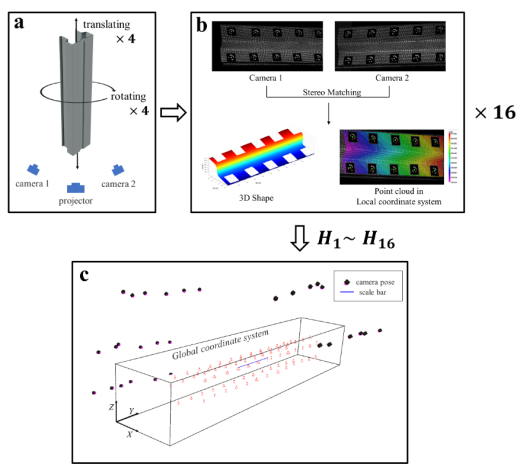
圖5 測量流程
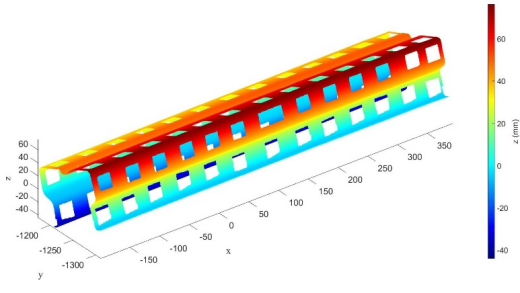
圖6 三維重建結(jié)果(單位:mm)
2�����、立柱的初始幾何缺陷
為了獲取試件的幾何缺陷�����,需要將測量的點云數(shù)據(jù)(使用中間580 mm的點云數(shù)據(jù)進(jìn)行初始幾何缺陷計算和建模)與構(gòu)件的設(shè)計值(即理想化的完美幾何形狀)進(jìn)行比較�����。采用迭代最近點算法(ICP) 將實測點云數(shù)據(jù)與理想幾何點云進(jìn)行配準(zhǔn)。使用的目標(biāo)函數(shù)如下:
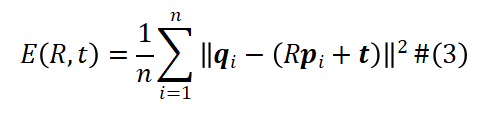
其中�,qi 和 pi 分別是理想幾何點云和實測點云的坐標(biāo)�����,R和t分別是從實測點云到理想幾何點云的旋轉(zhuǎn)矩陣和平移向量����。
配準(zhǔn)后的點云是與理想幾何點云差異最小的點云。配準(zhǔn)后����,兩組點云之間的差異即為試件的幾何缺陷����。在使用ICP算法進(jìn)行點云配準(zhǔn)時,每個截面有329個點��,沿構(gòu)件長度方向共有580個截面��。兩組點云數(shù)據(jù)的ICP配準(zhǔn)結(jié)果如圖7所示�。
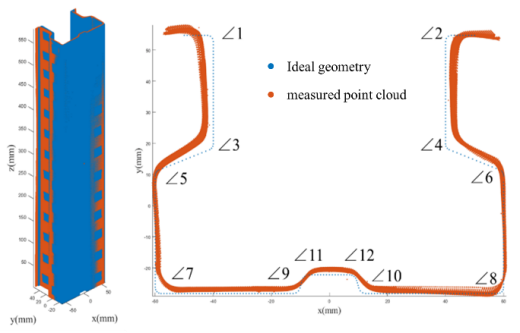
圖7 ICP配準(zhǔn)結(jié)果