為了實現(xiàn)大型結(jié)構(gòu)全周高精度三維動態(tài)變形測量��,單套三維數(shù)字圖像相關(guān)測量系統(tǒng)是無法滿足需求的�����,需要使用多相機系統(tǒng)對測量區(qū)域進行拆分,每套系統(tǒng)測量其中的一部分區(qū)域��,通過坐標(biāo)系統(tǒng)一與數(shù)據(jù)融合從而實現(xiàn)大范圍���、全場����、高精度變形測量��。
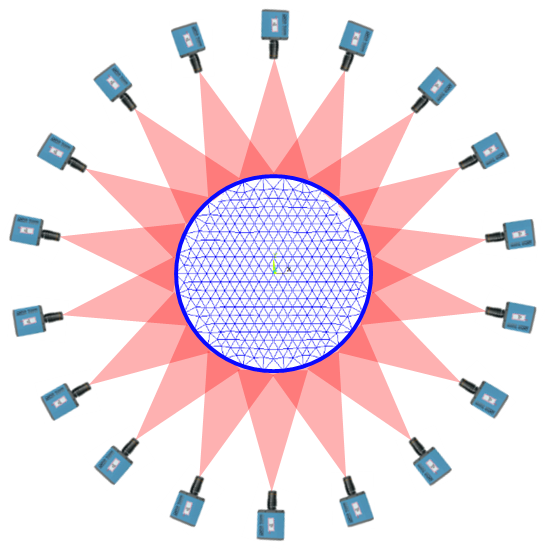
多相機全周變形測量示意圖
現(xiàn)場實驗主要分為兩塊,其一是對索進行靜態(tài)的張拉實驗�,其次是結(jié)構(gòu)的動態(tài)垮塌實驗�,均需要測量關(guān)鍵節(jié)點的位移變化。測量系統(tǒng)分為無人機輔助測量和多相機測量系統(tǒng)兩個部分�,基于無人機實現(xiàn)標(biāo)志點三維重構(gòu)用于靜態(tài)張拉實驗的節(jié)點測量,而由12臺相機構(gòu)成的多相機測量系統(tǒng)則負(fù)責(zé)結(jié)構(gòu)全周的動態(tài)垮塌監(jiān)測。利用結(jié)構(gòu)表面大量布置的圓形編碼標(biāo)志點�����,實現(xiàn)所有無人機結(jié)果和多相機結(jié)果的坐標(biāo)系統(tǒng)一。
實驗的操作步驟為:
(1)在拉索張拉前后階段���,無人機使用優(yōu)化后的飛行路徑對節(jié)點處進行不斷拍攝��,見圖(a)�,多張圖片經(jīng)過近景攝影測量方法計算,可以得到節(jié)點變形的高精度三維坐標(biāo)��。
(2)如圖(b)所示���,使用單反相機對地梁和邊柱處的編碼標(biāo)志點進行拍攝,邊柱上的編碼標(biāo)志點可以當(dāng)做不動點�����,其攝影測量重構(gòu)結(jié)果可用于坐標(biāo)系的統(tǒng)一,圖(c)為拉索張拉前后的變形結(jié)果均轉(zhuǎn)至單反相機攝影測量坐標(biāo)系��。
(3)在網(wǎng)殼結(jié)構(gòu)的連續(xù)倒塌實驗中�,12臺相機可兩兩組成一套雙目系統(tǒng),多個相機通過硬觸發(fā)同步�,拍攝倒塌實驗節(jié)點位移的全過程。
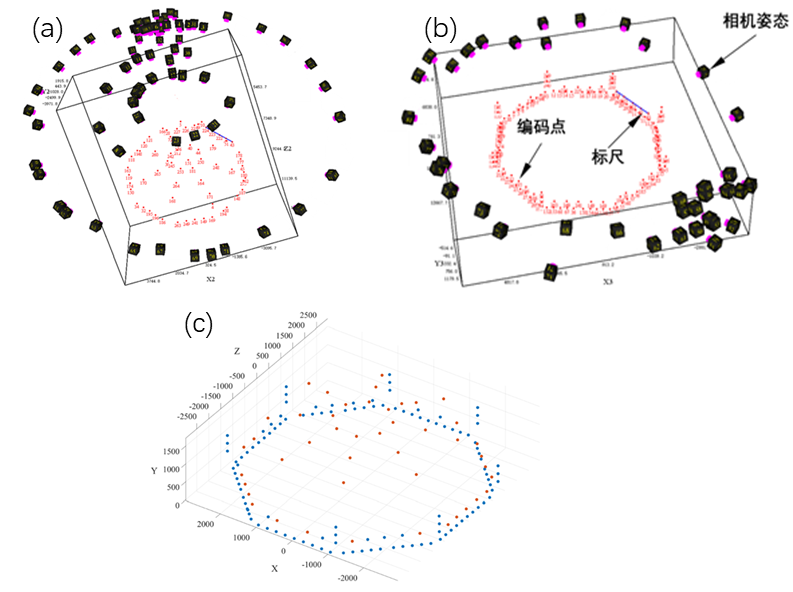
編碼標(biāo)志點的三維重構(gòu)結(jié)果:(a) 無人機拍攝重構(gòu)結(jié)果�;(b) 單反相機拍攝重構(gòu)結(jié)果����;(c) 兩套重構(gòu)數(shù)據(jù)坐標(biāo)系統(tǒng)一后的結(jié)果