產(chǎn)品介紹
多相機(jī)三維視覺(jué)位移應(yīng)變測(cè)量?jī)x由多個(gè)三維數(shù)字圖像相關(guān)測(cè)量系統(tǒng)組合而成�,每一套子系統(tǒng)均只拍攝被測(cè)物體的局部表面。多個(gè)三維數(shù)字圖像相關(guān)測(cè)量系統(tǒng)測(cè)量的形貌����、位移和應(yīng)變等結(jié)果通過(guò)外部參數(shù)相連接�����,最后統(tǒng)一在世界坐標(biāo)系中����,因此多相機(jī)三維數(shù)字圖像相關(guān)測(cè)量?jī)x測(cè)量的關(guān)鍵是系統(tǒng)參數(shù)的標(biāo)定。多相機(jī)三維數(shù)字圖像相關(guān)測(cè)量系統(tǒng)的系統(tǒng)參數(shù)標(biāo)定通常分為子系統(tǒng)內(nèi)參標(biāo)定與子系統(tǒng)之間的外參標(biāo)定����。子系統(tǒng)內(nèi)參標(biāo)定可以通過(guò)尺寸已知的標(biāo)定板進(jìn)行平面標(biāo)定法標(biāo)定�,子系統(tǒng)之間的外參標(biāo)定則有多種方法,目的是實(shí)現(xiàn)多相機(jī)三維數(shù)字圖像相關(guān)系統(tǒng)中多套系統(tǒng)測(cè)量結(jié)果在一個(gè)坐標(biāo)系中統(tǒng)一����。針對(duì)梁����、板����、柱等力學(xué)研究對(duì)象���,多相機(jī)三維數(shù)字圖像相關(guān)測(cè)量?jī)x可以有一字型����、矩陣型���、圓周型的多相機(jī)布置方式����。
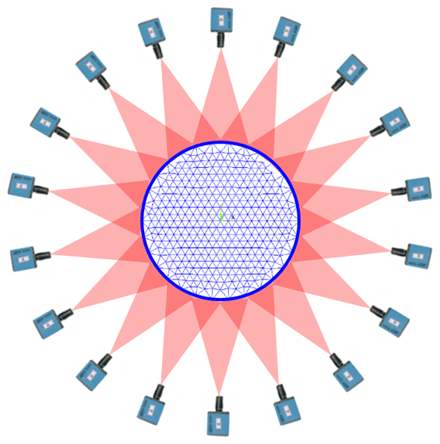
多相機(jī)全周變形測(cè)量示意圖
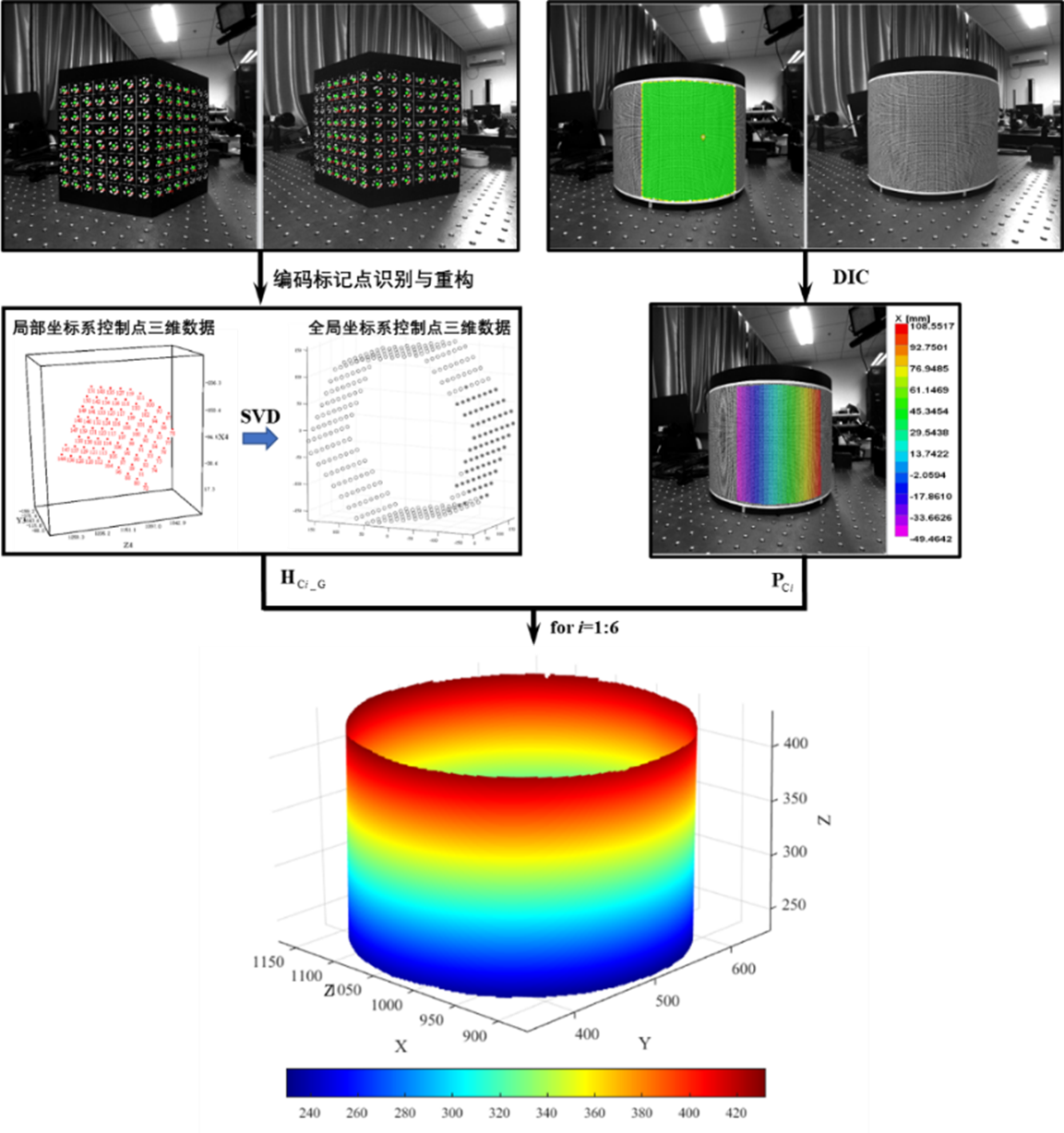
多相機(jī)坐標(biāo)系統(tǒng)一示意圖
產(chǎn)品特點(diǎn)
 超寬視場(chǎng)覆蓋:
超寬視場(chǎng)覆蓋:
多相機(jī)大范圍測(cè)量,支持100m2以上視場(chǎng)的全場(chǎng)測(cè)量���。
 360°無(wú)死角覆蓋:
360°無(wú)死角覆蓋:
通過(guò)多相機(jī)組實(shí)現(xiàn)被測(cè)物全周面測(cè)量����。
 非接觸測(cè)量:
非接觸測(cè)量:
測(cè)量距離0.2m~100m����,適應(yīng)不同場(chǎng)景需求。
 多相機(jī)協(xié)同:
多相機(jī)協(xié)同:
支持多個(gè)相機(jī)組同步測(cè)量�����,相機(jī)數(shù)目可任意擴(kuò)展��,最高可支持標(biāo)準(zhǔn)支持24臺(tái)相機(jī)同步工作����。
 測(cè)量精度高:
測(cè)量精度高:
系統(tǒng)三個(gè)方向位移靜態(tài)噪聲標(biāo)準(zhǔn)差小于0.01mm����,應(yīng)變靜態(tài)聲標(biāo)準(zhǔn)差小于50微應(yīng)變�����。
 測(cè)量范圍:
測(cè)量范圍:
應(yīng)變測(cè)量范圍 0.005%-2000%���。
 全場(chǎng)景動(dòng)態(tài)捕捉:
全場(chǎng)景動(dòng)態(tài)捕捉:
配合高速相機(jī)可達(dá)1,00,000fps采集幀率�,實(shí)現(xiàn)全場(chǎng)景動(dòng)態(tài)變形測(cè)量��。
 靈活性設(shè)計(jì):
靈活性設(shè)計(jì):
可根據(jù)需求升級(jí)相機(jī)�����、光源或算法�����,提高系統(tǒng)靈活性����。
應(yīng)用案例
 弦支穹頂結(jié)構(gòu)倒塌實(shí)驗(yàn) 火箭全周三維測(cè)量 盒式結(jié)構(gòu)振動(dòng)臺(tái)實(shí)驗(yàn)
弦支穹頂結(jié)構(gòu)倒塌實(shí)驗(yàn) 火箭全周三維測(cè)量 盒式結(jié)構(gòu)振動(dòng)臺(tái)實(shí)驗(yàn)
工程應(yīng)用價(jià)值
為大型建筑結(jié)構(gòu)抗震性能分析�����、大型結(jié)構(gòu)力學(xué)建模和破壞機(jī)理的深入研究提供可靠數(shù)據(jù)��。在土木工程領(lǐng)域,可用于橋梁��、大壩、建筑結(jié)構(gòu)等大型土木工程結(jié)構(gòu)的健康監(jiān)測(cè)��,實(shí)時(shí)監(jiān)測(cè)結(jié)構(gòu)在荷載作用下的位移和應(yīng)變變化�����,及時(shí)發(fā)現(xiàn)結(jié)構(gòu)的損傷和安全隱患�。航空航天領(lǐng)域�����,用于飛機(jī)��、火箭等飛行器的結(jié)構(gòu)測(cè)試和性能評(píng)估���。